实际上,关于AUTOSAR的相关问题,也是很多企业经常向飞斯柯罗咨询的内容。在本次网络研讨会中,我们将围绕屏幕上面的问题,并重点解答行业实务人员最为关注的一些核心问题。
接下来,将简要介绍一下飞斯柯罗在AUTOSAR相关领域所具备的能力。
首先,我们对车载电子控制器(ECU)拥有深厚的理解。我们自主开发了面向SDV的下一代控制器软件和硬件,并已成功注册成为全球OEM的Tier 1供应商。
其次,我们拥有强大的网络安全能力和专业的红队(Red Team)。我们已经完成了10个车型的全部控制器漏洞分析,并在约150种控制器上应用了自主开发的安全解决方案。凭借在网络安全方面的专业能力,我们能够在BSW开发过程中充分考虑网络安全因素,从而确保ASW能够稳定、可靠地运行。
最后,我们还拥有丰富的AUTOSAR实战经验以及协作能力。
通过在自研控制器中实际应用AUTOSAR,我们能够深入理解Tier企业在实际项目中的需求。同时,我们也与全球AUTOSAR提供商建立了战略合作伙伴关系。
在本期网络研讨会中,我们将基于飞斯柯罗的成功案例,与大家分享AUTOSAR在实务中的经验与方法。
■ 问题LIST
1. 在SDV时代,控制器开发企业面临的核心课题是什么?
2. 什么是AUTOSAR?
3. AUTOSAR不是只需要应用一种就可以了吗?
4. 如何应用AUTOSAR?有哪些实际应用案例?
5. ASW与BSW开发时需要考虑哪些因素?
6. 为满足网络安全要求,是否必须使用AUTOSAR?
7. 如何高效使用AUTOSAR Authoring Tool?
8. 自动化后,代码变更是否会带来影响?
9. 如何进行验证?
■ 文本 Ver.
1. 在SDV时代,控制器开发企业面临的核心课题是什么?
在SDV时代带来的创新性变革中,我们非常理解各位控制器开发人员所面临的各种挑战。特别是在向SDV转型的过程中,行业正面临着几项重要课题。主要挑战包括以下几个方面。
首先是软件复杂性。在管理不断增加的软件复杂性的同时,确保系统的可靠性和安全性至关重要。
第二是网络安全。为了保护SDV所产生的大量数据,防止网络攻击和个人信息泄露,需要采用强大的加密技术以及安全的数据存储机制。
第三是法规与法律体系。围绕ADAS(高级驾驶辅助系统)等技术,需要建立更加完善的监管体系,同时在责任划分等问题上,也需要政府与产业各方的协同合作。
第四是互操作性与系统集成。要将来自不同供应商的各种软件组件整合为一个协同运作的系统,需要实现标准化,并加强产业之间的协作。
最后是技术发展与成本管理。随着技术的快速发展以及持续的软件更新,企业在适应这些变化的过程中,成本会不断增加,开发复杂度也会随之提升。
而“AUTOSAR”正是在这样的背景下产生的,为了推动软件标准化,提升系统的安全性、性能以及用户体验。
AUTOSAR是AUTomotive Open System Architecture(汽车开放系统架构)的缩写。可以理解为面向汽车产业的一种开放式系统架构。通过这一架构,可以使来自不同供应商的软件和硬件组件实现顺畅协同工作。
AUTOSAR联盟的口号是:“在标准上合作,在实现上竞争”。也就是说,各家汽车制造商不需要各自重复研究基础架构,而是通过合作共同制定优秀的架构和标准化规范。在此基础上按照统一标准进行开发,无论是整车厂还是零部件供应商,都能够从中受益。接下来我们来看一下,AUTOSAR 如何帮助解决刚才提到的那些挑战。
首先,AUTOSAR提供了一个标准化的模块化框架。模块化使各个组件能够在不影响整个系统的情况下,独立进行开发、升级或替换。
在网络安全方面,AUTOSAR定义了安全规范,并通过自动化安全测试工具来检测系统中的漏洞。这些自动化工具还可以通过集成测试确保各控制器之间的交互正常,从而简化开发和测试流程。同时,通过系统验证来确保控制器的可靠性、性能以及安全性。
在法规与合规方面,例如软件更新管理法规(UN R156)相关的要求,AUTOSAR也提供了支持。AUTOSAR提供了OTA更新标准。同时,通过自动化系统来处理更新的分发,并通过验证流程来确认更新的稳定性。
在互操作性与系统集成方面,AUTOSAR通过提供标准化架构,确保来自不同供应商的控制器能够顺畅协同运行。同时,软件组件也可以在多个项目或不同车型之间实现复用。
最后,AUTOSAR还提升了系统的灵活性和可扩展性。通过AUTOSAR,可以更加轻松地集成新的功能和更新,这对于SDV来说尤为重要。同时,AUTOSAR也能够支持车辆日益增加的系统复杂度和数据需求。由此可以实现降低开发成本、加速创新、改善维护与更新效率,并加强各利益相关方之间的协作。
目前,AUTOSAR已经被众多主要汽车制造商和零部件企业所采用。例如重要的AUTOSAR合作伙伴包括BMW、Ford、GM、Toyota、Volkswagen,以及现代/起亚汽车。这些实际应用案例充分证明了AUTOSAR的必要性和有效性。
AUTOSAR的分层结构主要包括 ASW、BSW 和 RTE。ASW(Application Software)是应用软件模块,用于实现发动机控制、制动系统等特定功能。BSW(Basic Software)是基础软件模块,包含硬件抽象、内存管理等功能。RTE(Run-time Environment)即运行时环境,用于管理ASW与BSW之间的数据流。这种结构能够促进软件开发的模块化,并提升系统之间的互操作性。
应用软件(Application SW)为了能够在不依赖具体硬件的情况下实现独立复用,通常会在 VFB(Virtual Functional Bus,虚拟功能总线)上进行设计。当然,Application SW也需要适配AUTOSAR这一新的平台。为了将VFB在实际系统中实现,BSW需要完成大量工作。开发方式也从过去通过键盘手写代码(Hand coding),转变为通过工具进行配置(Configuration)。通常情况下,最基础的AUTOSAR实现大约需要100~200KB的Flash内存。而在高度集成的高级控制器中,一般需要1~4MB的Flash内存。
3. AUTOSAR不是只需要应用一种就可以了吗?
在SDV车辆中,通常会同时应用Classic AUTOSAR和Adaptive AUTOSAR。Classic平台非常适合用于发动机控制、制动系统等需要实时性的传统功能。而Adaptive平台则更适用于ADAS和信息娱乐系统等高性能应用。将这两个平台结合使用,可以为车辆提供更好的可扩展性、灵活性以及面向未来的适应能力,使车辆能够更好地应对新技术的发展。目前,BMW、Volkswagen、现代汽车等制造商都在同时应用这两种AUTOSAR平台。
业界通常会同时应用Classic和Adaptive AUTOSAR,这一点我们已经了解了。那么,在选择AUTOSAR解决方案时,有哪些方面是需要重点考虑的呢?
在选择AUTOSAR解决方案时,首先需要考虑的是MCU的可用性与兼容性,这是一个核心因素。AUTOSAR 解决方案需要在多个方面与目标芯片组保持良好的匹配,例如:包含各类工具和库的工具链(Toolchain)、Authoring工具的用户体验(UX)与使用便利性,以及合规性与技术支持能力。通过这些要素,才能确保开发流程顺畅,并构建稳定且高效的汽车软件系统。
另外一个需要考虑的方面是:为了满足不同汽车制造商的需求和标准,必须对标准架构进行相应的调整。这包括定制化扩展、功能安全与网络安全以及性能优化等内容。通过满足这些要求,制造商既能够遵循行业标准,也能够凭借自身的独特功能在市场中脱颖而出。
目前市场上存在许多AUTOSAR供应商。不同供应商在许可模式、维护条件以及相应价格体系方面都会有所不同,因此建议在采购前进行充分比较。同时,也需要确认购买后是否能够获得培训支持以及工程技术支持。
4. 如何应用AUTOSAR? 有哪些实际应用案例?

首先,目前供应给韩国最大汽车OEM——H公司的大部分控制器,主要采用了Mobilgene AUTOSAR平台。但是,当面向海外汽车OEM,或者面向除H公司之外的韩国OEM时,实际情况是需要采用 ETAS、Vector或Elektrobit等公司的AUTOSAR平台,而不是Mobilgene。
飞斯柯罗在为K公司开发网关控制器时,也曾应用过AUTOSAR平台。在项目初期,由于给定的开发周期非常短,我们也曾考虑过自行开发平台,但综合考虑到“系统运行的稳定性以及市场验证的可靠性”,最终选择采用已经经过验证的AUTOSAR平台。在对不同平台进行比较时,我们主要考虑了开发周期、价格、技术支持是否完善,以及是否包含网关功能等因素。在综合这些条件之后,最终选择了其中一家厂商的方案并进行了应用。
当时根据客户的要求,我们在2个月内完成了开发,并交付了应用AUTOSAR的网关控制器软件。该软件实现了网关的基础功能,包括消息路由(Message Routing)、信号路由(Signal Routing),以及部分诊断功能。
由于AUTOSAR的应用通常需要较高的技术能力,很多人听到仅用2个月就完成AUTOSAR 应用开发都感到非常惊讶。
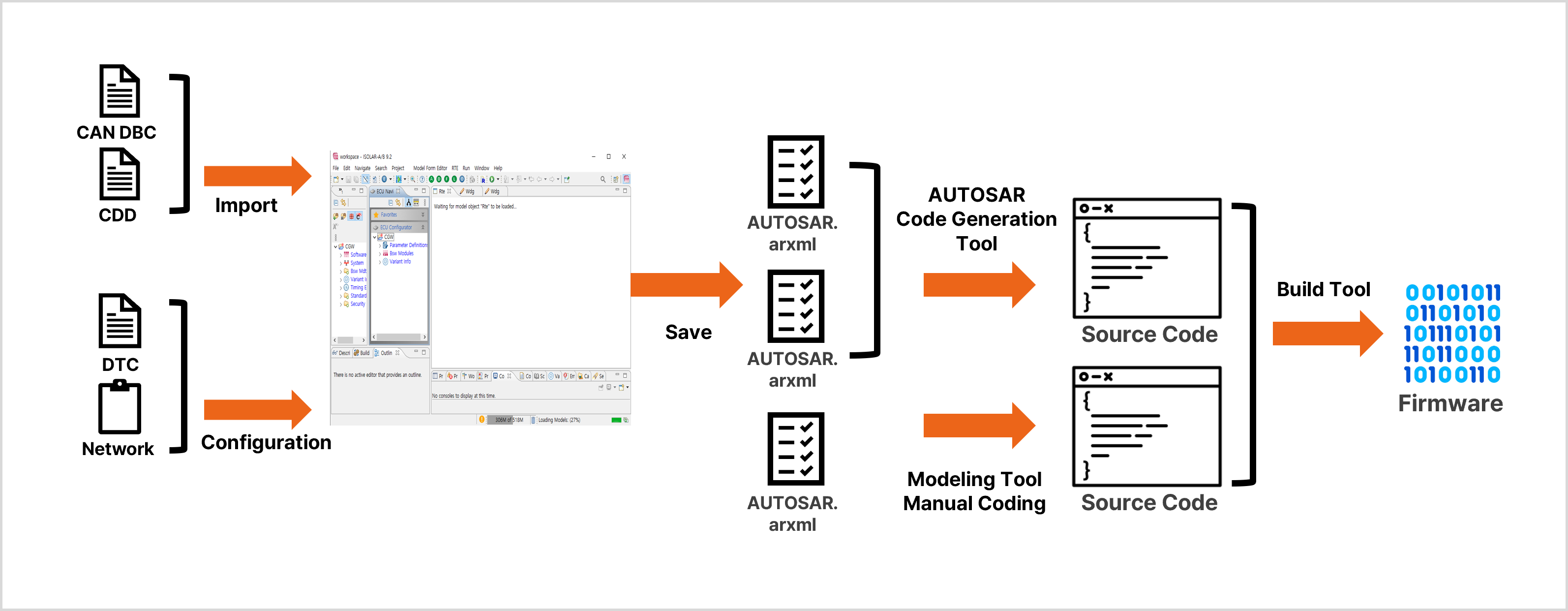
一般的AUTOSAR开发流程如图所示。
1) 首先,会根据控制器的需求,客户通常会提供CAN DBC文件、诊断CDD文件、需要实现的DTC(故障码) 以及网络相关信息 等基础资料。
2) 接下来,将收到的CAN DBC和诊断CDD导入到AUTOSAR工具中,并利用其他信息在工具中完成Configuration(配置)工作。
3) 当配置完成并保存后,系统会生成 .arxml文件。该文件不仅包含了BSW中设置的配置参数,还包括ASW的软件组织(SW-C)的输入输出信息以及Runnable的调用周期等内容。
4) 接下来,通过BSW Code Generation过程,系统会根据包含BSW配置信息的arxml文件生成BSW代码;通过RTE Code Generation,生成与Runnable调用及ASW软件组件输入输出接口相关的代码。
5) 利用包含ASW信息的arxml文件,还可以使用Matlab等建模工具构建应用逻辑,并生成应用层源代码。
6) 最后,将生成的源代码通过编译工具(Compiler Tool)进行构建,就可以生成用于控制器的固件镜像(Firmware Image)。然后将该镜像下载到目标控制器MCU上进行运行验证。
通过今天的介绍来看,AUTOSAR 的应用似乎对Tier企业来说有很多优势。不过在应用之前也需要进行充分的考虑。大家可能都知道应用AUTOSAR的诸多优势,从开发者的角度来看,最大的优点在于MCAL、BSW、RTE和OS Configuration等大部分代码都是通过Configuration生成的,因此可以显著减少人为编码错误的发生。不过,这也意味着需要进行大量的配置工作。例如,CAN消息、信号以及所需的诊断功能等,通过CAN DBC和诊断CDD文件导入到AUTOSAR工具时,与CAN相关的设置可以在一定程度上自动完成,但除此之外仍需进行大量额外配置。
因此,对于首次接触AUTOSAR的开发者来说,采用AUTOSAR平台可能会感到比较陌生,入门门槛较高,操作也不容易。建议在充分接受培训并积累一定经验后,再进行引入与应用。
5. ASW与BSW开发时需要考虑哪些因素?
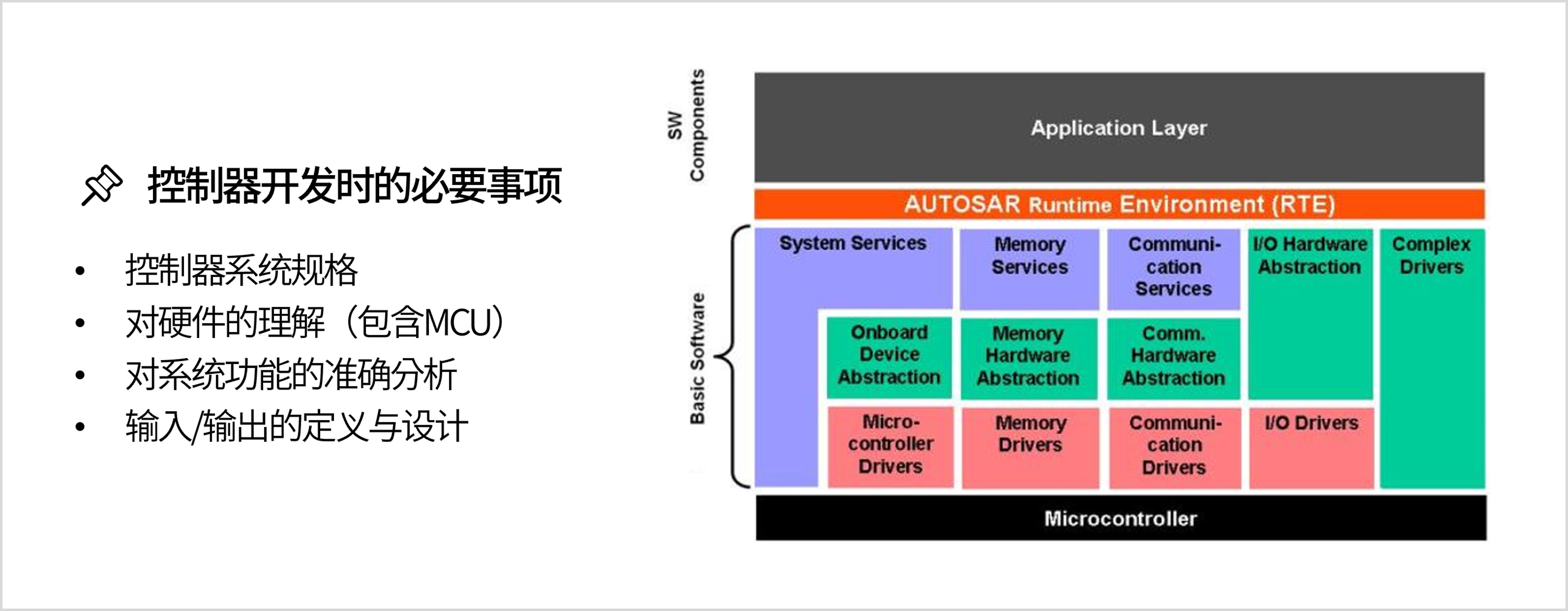
在使用AUTOSAR平台进行开发时,最重要的方面是对控制器系统规格、包含MCU的硬件结构的充分理解,以及对系统功能的准确分析、输入输出的定义与设计。其实,这部分即便不使用AUTOSAR平台,也是控制器开发中最基本且最重要的环节。
正如之前提到的,AUTOSAR 的一个重要优势就是软件的可复用性。即便控制器的硬件发生变化,只要该控制器的功能未变且输入输出接口未发生变化,ASW部分就可以在新的硬件上无需修改直接复用。如果控制器的功能和输入输出未发生变化,ASW部分是可以复用的。那么,在进行ASW开发时,需要考虑哪些方面呢?
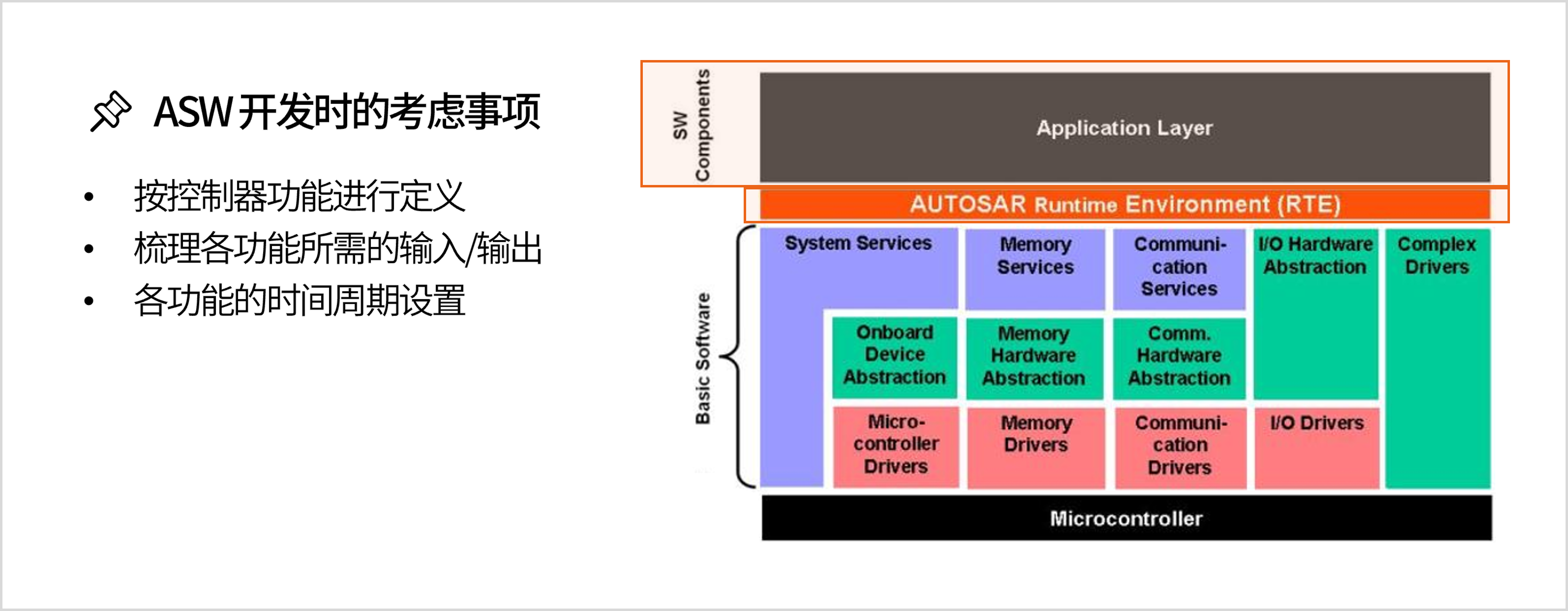
在开发ASW时,首先需要考虑的事项是控制器各功能的定义,以及针对每个功能所需的输入输出整理,同时明确这些功能应当以什么样的时间周期执行。
当这些内容整理清楚后,无论是使用 Matlab等模型化工具开发,还是通过手动编码,都可以在与BSW独立的虚拟RTE环境中进行ASW开发。待BSW开发完成后,再通过Integration集成过程,即可完成整个系统的构建。
刚才已经简单介绍过RTE,能否再为大家进一步说明一下它的作用呢?
RTE即Run-Time Environment(运行时环境),可以理解为在ASW中各个功能模块(Software Component)之间,以及 软件组件与BSW之间传递数据和信号的一个 Virtual Function Bus(虚拟功能总线)。RTE位于ASW与BSW之间,通过定义它们之间传递的数据,实现了RTE的虚拟化,从而使ASW和BSW能够独立分离开发,互不影响。
从ASW到RTE的讲解非常清晰,帮助大家理解了整体流程。那么,在开发BSW时,需要考虑哪些方面呢?
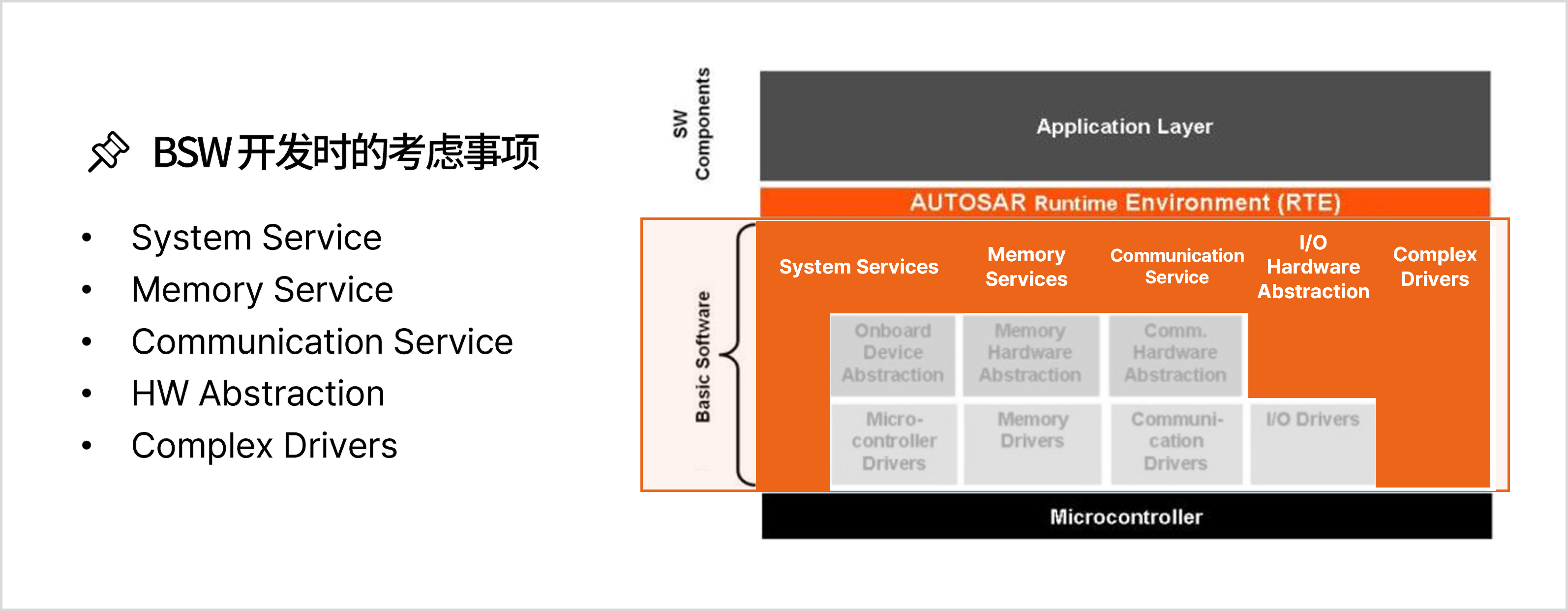
可能大家在开发BSW时,最头疼、最需要思考的就是各种配置内容了。如果看AUTOSAR的核心BSW,它主要包括System区域、Memory区域、Communication Service区域、HW Abstraction区域,以及被称为 CDD(Complex Driver)的复杂驱动区域。
首先,System Service区域包含 Os、Mcu、BswM、WdgM、Dem、Gpt 等模块,它负责向应用程序和BSW模块提供整个系统通用的服务。在配置和开发时,需要考虑以下各方面内容:
- 首先,在Os模块中,需要配置具有执行周期和优先级的各类Task,是否使用中断及其对应的ISR连接,以及用于互斥(Mutual Exclusive)的资源。
- 在Mcu模块中,需要配置系统运行所需的基础Clock,并设置控制器的运行模式,如Normal、Sleep、Standby等。
- 在BswM模块中,需要配置系统运行相关的模式(Mode),以及在各模式下应执行的 Action List。
- Gpt(General Purpose Timer)模块用于配置系统中使用的各种定时器。
- 接下来,Watchdog模块用于在软件停止运行、超过定义的时间周期,或执行顺序出错等情况下,确保系统能够重新启动,防止系统异常运行。
- 最后,Dem模块(通常与DTC相关)用于在控制器运行中发现异常时,将异常记录到NVRAM,并将运行状态报告给仪表盘或其他显示模块,以便用户可以察觉系统异常。
能否也介绍一下Memory Service和Communication Service部分。在Memory Service区域中,典型的模块是Nvram,它可以在系统关闭再启动后保留数据。主要存储与DTC相关的信息,以及通过诊断读写的数据。所使用的Flash配置需要根据 主芯片(Main Chipset)或Flash规格进行正确设置,同时还需要配置将要存储的数据项。
在Communication Service区域,需要对与CAN相关的通信模块进行配置。如前所述,当将 CAN DBC和诊断CDD导入AUTOSAR工具时,基本的消息或信号配置会在一定程度上自动生成。此外,对于网关而言,需要进行路由配置,这时可能需要在PDU-R模块中对每个Tx和Rx消息进行单独映射。
I/O硬件抽象(Hardware IO Abstraction)区域是用于使用MCU的输入输出端口(如Adc、Dio、Port、Spi、Uart等)的BSW区域,需要对实际硬件引脚进行配置,并根据各引脚的使用用途进行相应设置。
CDD(Complex Driver)是指在AUTOSAR的BSW/MCAL中未提供的服务需要开发者自行实现时的区域。在这个区域,开发者需要自行定义接口并进行实现。由于AUTOSAR并未提供固定接口,因此可以自由定义和实现接口,这部分不需要过于复杂化或担心。
那么,有没有什么方法可以高效地开发ASW和BSW 呢?
由于控制器开发厂商对产品最为熟悉,因此ASW应该由控制器开发厂商通过多种方式自行开发并实现内化,这是比较合适的方法。然而,即便对控制器及硬件非常了解,BSW的开发仍然较为复杂,因为需要配置的内容非常多,单独开发可能难以高效推进。因此,如果与具有AUTOSAR实际开发交付经验、并熟悉多种AUTOSAR工具的专业公司合作,可能会更高效、更快速地完成产品开发。飞斯柯罗不仅使用AUTOSAR开发过产品,也接触过多种AUTOSAR工具。如果在AUTOSAR相关的合作上有需求,请联系飞斯柯罗。
6. 为满足网络安全要求,是否必须使用AUTOSAR?
准确来说,并不是必须的。在AUTOSAR出现之前,就像CAN系统一样,网络安全也已经能够实现并正常运行。不过,AUTOSAR的出现目的是为了提升软件模块复用、提高系统的质量和可靠性,这一点在前面的内容中已经多次说明。网络安全相关功能也可以从同样的角度来理解。
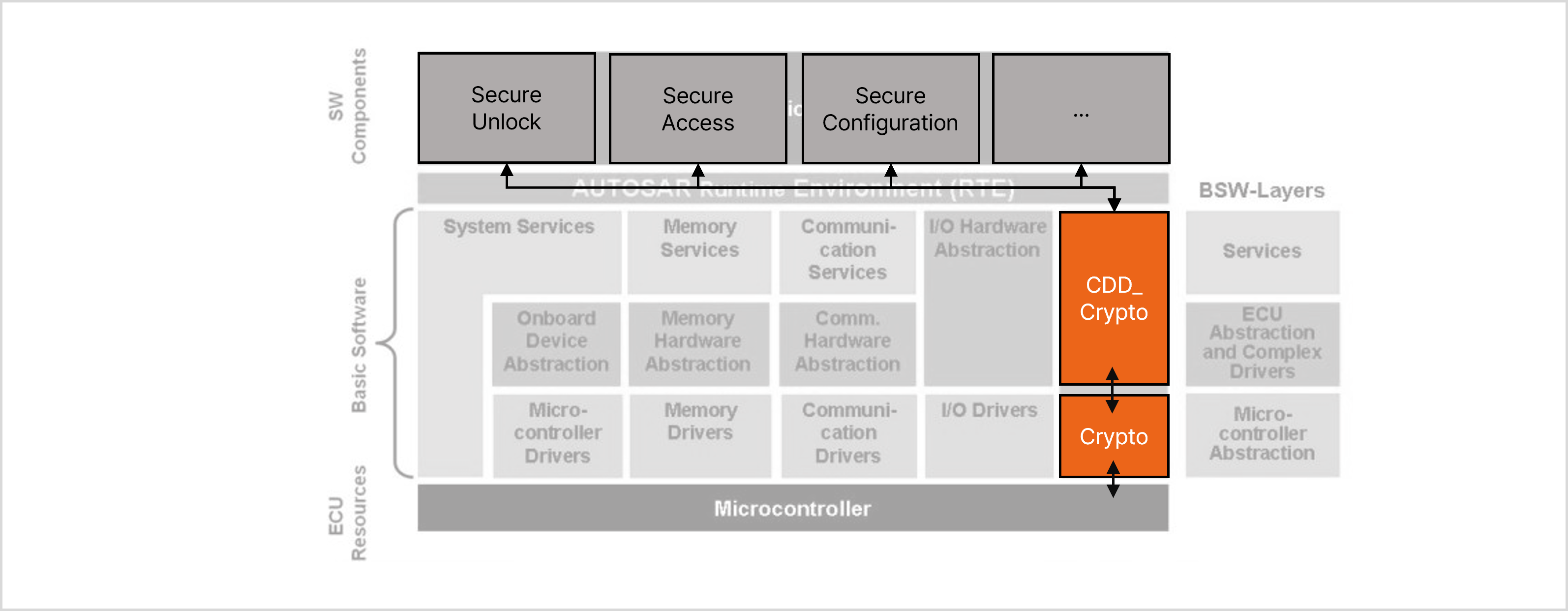
在ASW中,当执行网络安全相关功能时,AUTOSAR的BSW提供了Crypto Service Layer,其中包含 CSM模块。该CSM模块提供了大部分网络安全所需的接口,包括电子签名验证、MAC生成、加密与解密、随机种子生成等。
但是,我们的安全网关需要根据不同证书授予不同的诊断功能,并且只有持有认证证书的设备才能访问诊断端口,从而增强网络安全功能。因此,单靠BSW默认提供的CSM模块无法实现增强网关的全部网络安全功能,我们在Crypto MCAL之上自行实现了CDD_Crypto,将这些增强功能应用于系统中。
通过这种方式,即便MCU发生变化,只要在 MCAL层配置Crypto模块,网络安全模块仍然可以复用。由于这些软件已经经过多次验证,因此可以减少实现和验证所需的时间,这也是一个显著优势。
将AUTOSAR平台及网络安全模块的应用交给像飞斯柯罗这样的专业公司来开发,也是一种可行的方法。飞斯柯罗在这类软件架构上有完善的设计经验,并且已经成功应用于量产。如果在相关方面有任何疑问,欢迎随时联系飞斯柯罗。
7. 如何高效使用 AUTOSAR Authoring Tool?
当然有。我想以自动化作为一种有效方法来说明。正如前面的问题中也提到的,AUTOSAR通常由AUTOSAR解决方案供应商开发并提供的,这被称为AUTOSAR Package。这个AUTOSAR Package中包含了Configuration Tool(也就是Authoring Tool)、BSW以及RTE。
AUTOSAR的一个核心理念就是尽量减少人为错误,也就是尽可能降低由于人工操作带来的失误。为了实现这一点,通常会通过Configuration Tool/Authoring Tool来自动生成代码。因此,Vector的Microsar使用DaVinci,ETAS AUTOSAR使用ISOLAR,Elektrobit的EB Tresos使用EB Tresos Studio,Mobilgene使用Mobilgene C Studio等工具。
像这样,使用AUTOSAR的好处是仅通过配置就能生成经过验证的代码并直接使用,但Configuration Tool的使用并不简单,需要进行非常细致的设置。当这些细致的设置项增多时,在配置过程中可能发生人为错误。而且,在配置过程中,经常需要多次重复类似的配置操作。因此可以说,这是一项高度依赖工具使用熟练度,并且需要投入大量时间和精力的工作。
因此,如果对Configuration进行自动化,可以通过改善可用性降低入门门槛,同时减少人为错误,还可以将重复的配置工作降到最低,最大化开发生产力,并提高最终成果的一致性和可靠性。
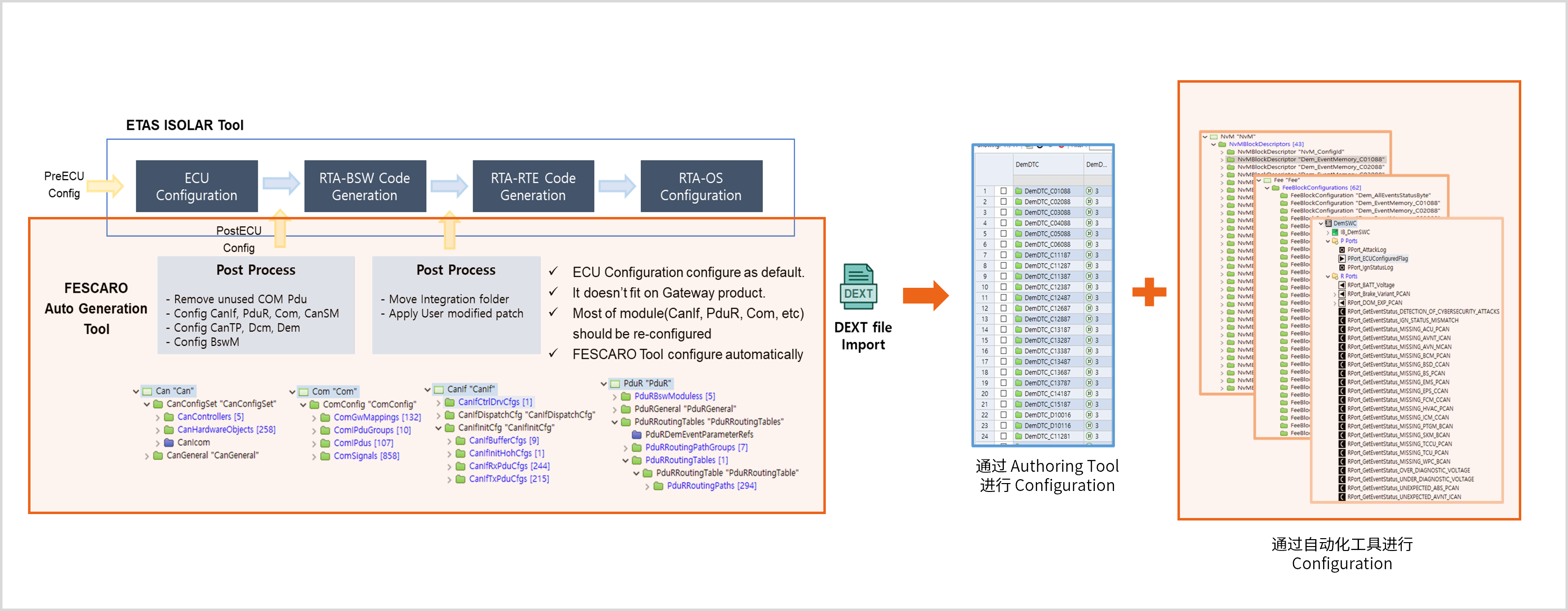
目前大多数Authoring工具会对部分配置进行自动化,但对于整个项目级别的配置仍显不足。尤其是在通过复用硬件和软件,将控制器派生到整车或应对其他OEM客户时,如果能实现自动化,仅需对部分内容进行修改,其效果将非常显著。
例如,要完成与诊断DTC相关的整体配置,需要在DEM Service中新增DTC条目,除此之外,还需要对每个DTC代码所需的NVRAM和FEE配置 以及ASW中用于DTC状态监控和事件设置的Port配置进行配置。在Authoring工具中,可以通过导入DEXT文件 在DEM Service中设置DTC条目,但其余的 NVRAM/FEE和ASW Port配置 仍需单独完成,且当DTC条目较多时,需要对每个条目进行重复操作。在此过程中,如果遗漏某些条目或连接错误信息,DTC将无法正常工作。如果对这些配置部分进行自动化,正如前面所提到的,可以最大化时间效率并提升成果的可靠性。
当然会有影响。不过,如果实现了自动化,这些变化是可预测的。因为在进行配置自动化时,我们通常已经验证过其结果。
然而,配置自动化带来的变化,也可能像一般修改一样,产生与预期不同的影响。因此,无论是否自动化,即便是微小的配置修改,也必须对整个控制器功能进行验证。通常我们称这种验证为回归测试(Regression Test)。其目的是确认在修改前能正常运行的功能,修改后是否仍然正常。在软件开发过程中,回归测试是反复进行的。每次软件更新时,如果手动对全部功能进行验证,既不容易,又会消耗大量资源和时间。为了解决这个问题,验证过程也需要自动化。
那么,为了高效地进行重复性测试,通常会采用什么方法呢?
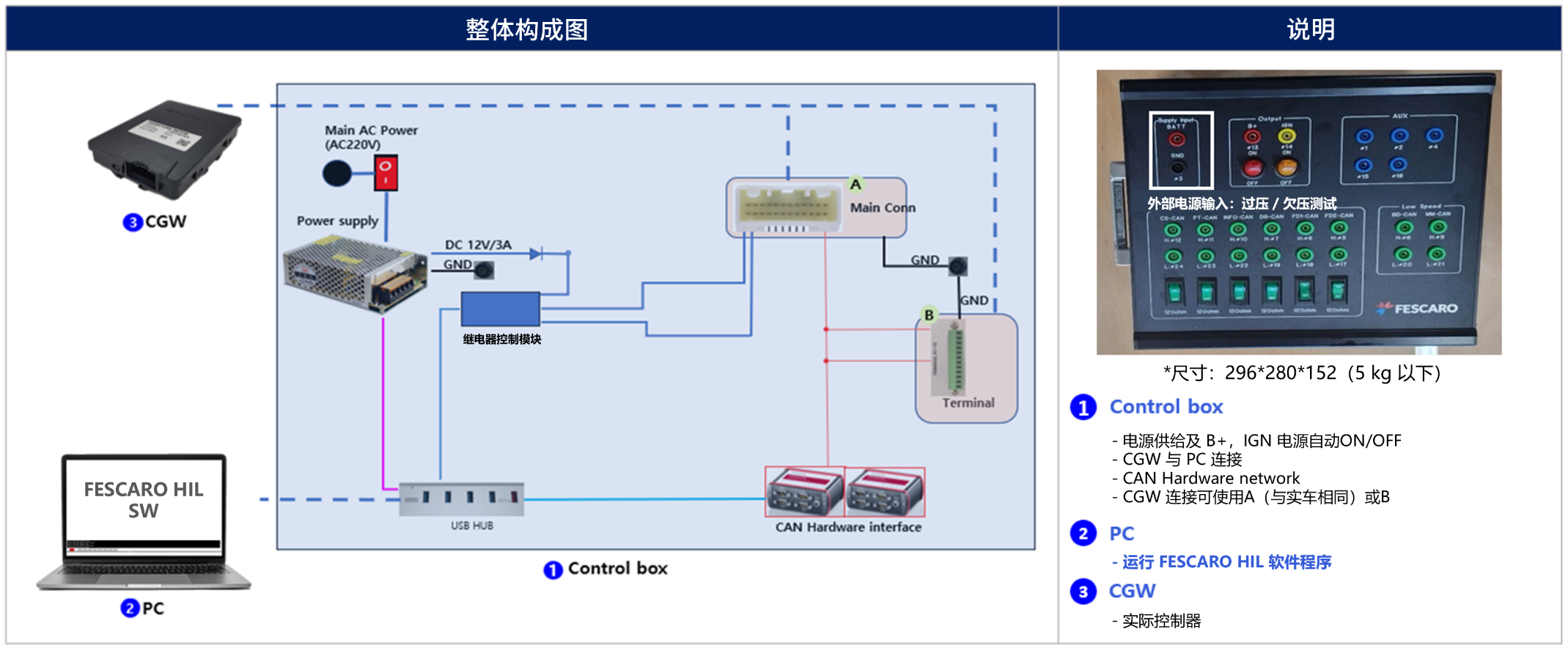
通常会通过HIL(Hardware In The Loop)、SIL(Software In The Loop)等方式,自动执行测试。顾名思义,这是将控制器置于类似实车的虚拟化环境中进行测试。HIL是基于硬件的测试环境,利用各种设备搭建测试环境,并将实际控制器连接进行测试。SIL是通过软件搭建虚拟环境,在这个虚拟化环境中运行软件进行测试。目前,大多数自动化测试仍然通过HIL来实现。不过,由于软件技术和复杂性不断发展,SIL的使用频率也在增加。
飞斯柯罗在开发控制器时,也曾与专业厂商合作搭建HIL环境,同时也有自主开发并使用HIL系统的经验。通过使用HIL,可以为每个测试用例设置所需输入和期望结果,自动执行全部测试用例,并对执行结果进行报告。
总的来说,用一句话回答就是 “自动化”。通常,验证活动并不是只在某个特定阶段、特定环境下进行,而是从初始设计阶段到开发进行中,再到开发完成阶段,都需要进行多样化的验证。并且在每个阶段,验证的目的、预期结果以及使用的工具都各不相同。
在设计阶段,通常会通过审查设计结果的适当性、合理性、一致性和完整性来展开验证活动。从网络安全的角度来看,这包括制定网络安全概念、设定网络安全目标以及生成需求的过程。在这个过程中,也会对产出的结果进行审查,例如是否准确、完整、一致,以确保结果的质量。如果采用模型驱动的设计,还可能通过 MIL(Model In The Loop)进行验证。在实际软件实现阶段,则会进行大量的代码审查、静态验证、动态验证和单元测试等活动。
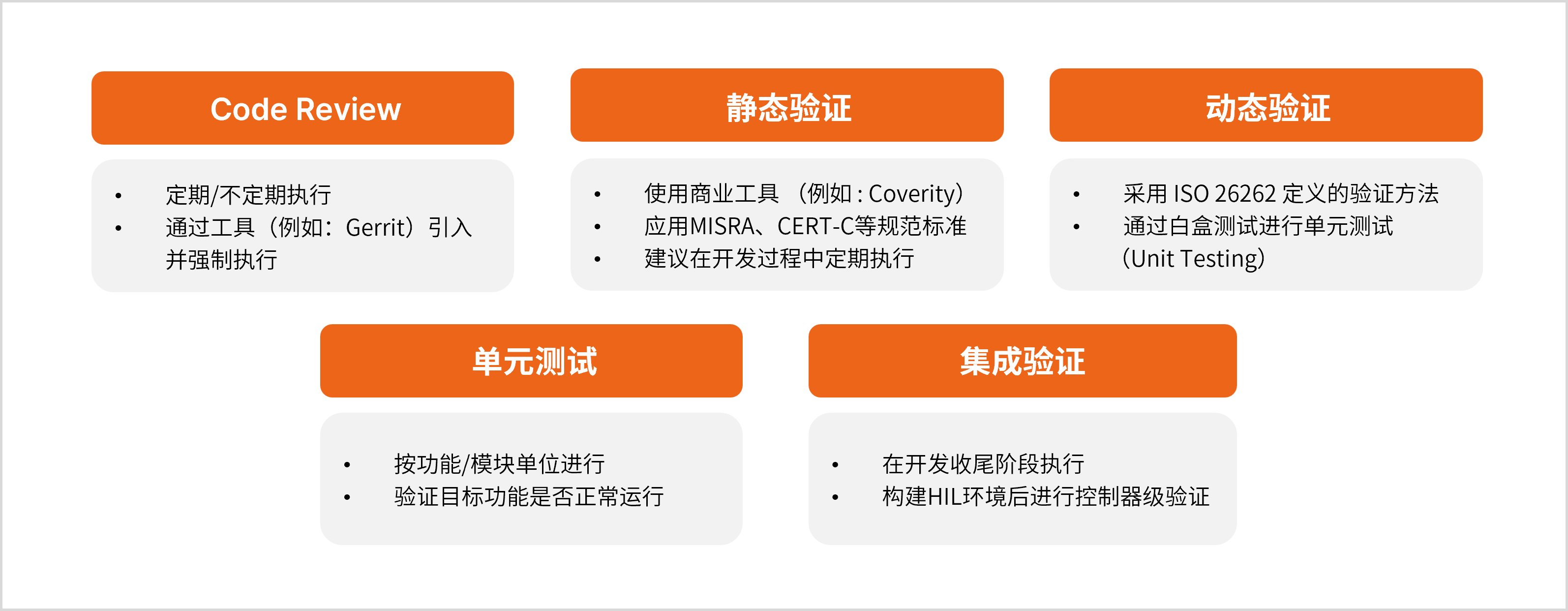
我们来逐一说明。对于 Code Review(代码审查)活动,既可以以团队或负责人为单位定期/不定期进行,也可以通过引入Gerrit等工具,将代码审查活动强制化。
对于静态验证,通常会使用Coverity等商用工具,并应用MISRA或CERT-C等标准。有时静态验证会集中在开发接近完成的阶段进行,但这样一来,为了修复缺陷而进行的代码修改会发生在开发收尾阶段,可能会影响已实现的功能,效率也不高,因此建议在开发过程中定期进行。
对于动态验证,通常会按照ISO26262中定义的验证方法进行,在工具方面虽然有多种选择,但我们主要使用Vector CAST。以我们为例,动态验证的单元会以白盒测试的方式进行单元测试(Unit Testing),并将语句覆盖率(Statement Coverage)和分支覆盖率(Branch Coverage)等执行目标达到100%。
对于单元测试,通常会以功能或模块为单位进行,验证该单元中预期的功能是否能够正常运行。
在开发接近完成的阶段,会进行集成验证。正如前面提到的,集成验证需要搭建HIL环境,在实际车辆验证之前,先对控制器单元进行充分验证,这样才能最大化实车验证阶段的效率。
为了帮助大家更好理解,举一个我们开发的案例来说明。我们曾开发CGW(Central Gateway),其功能验证大致分为 1)基本功能验证和2)网络安全功能验证两部分。
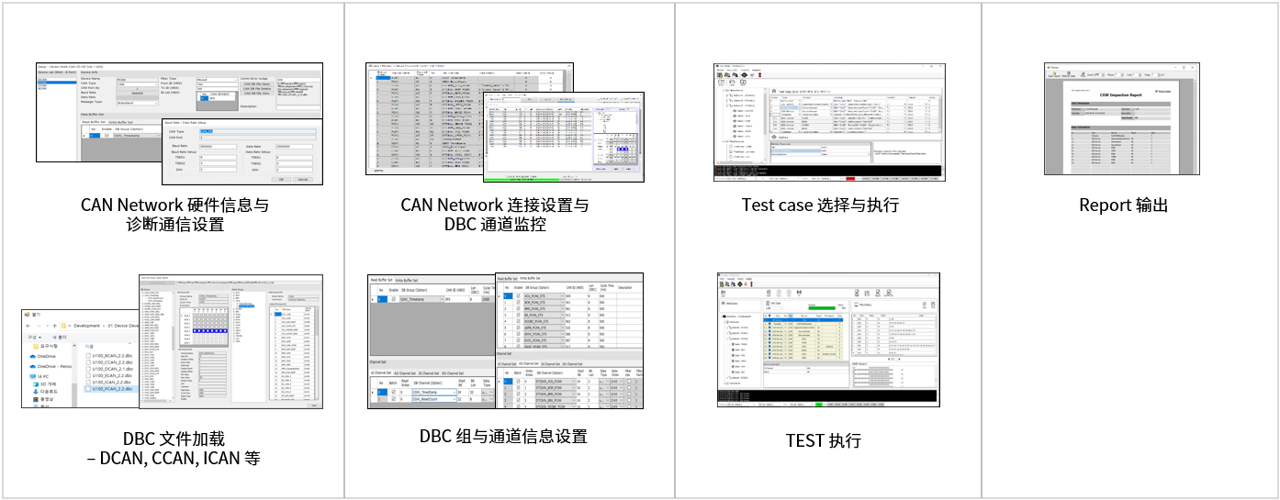
对于1)基本功能,由于CGW所需的功能在不同车辆或OEM之间差异不大,因此我们与HIL 设备专业厂商合作开发了测试系统并持续使用。我们特别关注的一点是,根据车辆型号变化而不同的CAN信息,自动生成测试用例,并根据这些测试用例自动执行测试,同时自动生成结果报告。
对于2)网络安全功能,由于不同OEM的要求非常具体化(specific),我们专门制作了HIL设备来进行测试,并实现了从测试用例生成、执行到结果报告编写的全流程自动化。
正如大家所感受到的,随着汽车和控制器中软件比重不断增加,谁能够更高效且稳定地进行软件开发,直接关系到生存能力。这也是为什么会选择像AUTOSAR这样标准化、可复用性高的Platform SW的原因。事实上,开发固然重要,但验证活动尤其耗费时间和成本,且需要反复执行,因此如何实现自动化就变得非常关键。
飞斯柯罗最初是一家专注于网络安全的公司,如今也在控制器开发以及控制器软件开发合作方面开展了大量工作。如果大家在软件开发或验证相关问题上有任何疑问,我们也非常乐意与大家交流,并一起寻找解决方案。欢迎随时与我们联系。
飞斯柯罗是韩国领先的汽车网络安全专业企业。我们通过为客户量身定制解决方案,根据客户的实际情况和环境,提供务实的技术突破口,解决复杂的技术问题。
从专用的网络安全控制器SGW,到无需更换芯片即可满足法规要求的HSM安全解决方案,再到支持网络安全持续优化的“一站式运营管理平台”——CSMS门户,飞斯柯罗致力于以务实的方式解决行业面临的困境,立志成为基于SDV(软件定义车辆)的未来移动出行产业中的重要参与者。我们的团队由汽车电子控制系统开发专家和白帽黑客组成,具备卓越的专业实力。